Die Variabilität von häufig historisch gewachsenen Verkehrsführungen ist im städtischen Bereich sehr groß und der Zustand der Verkehrsinfrastruktur ist nicht immer gut. Zudem ist die Diversität der Verkehrsteilnehmer im Vergleich zur Autobahn sehr groß und die verfolgten Ziele und Intentionen der Verkehrsteilnehmer sind mannigfaltig. Aus diesen Gründen weist auch deren Verhalten ein großes Spektrum auf. Die Prognose des zukünftigen Verhaltens der Verkehrsteilnehmer erfordert deshalb, auch den Situationskontext mit entsprechenden Randbedingungen detaillierter zu erfassen.
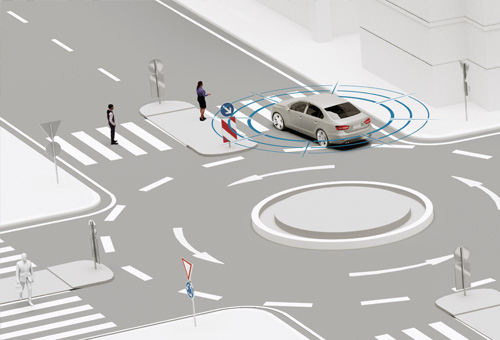
Um ein vorausschauendes und kooperatives Fahrverhalten des automatisierten Fahrzeugs im Zusammenspiel mit anderen Verkehrsteilnehmern - etwa nicht automatisierten Fahrzeugen, Fußgängern, Radfahrern - generieren zu können, muss das automatisierte Fahrzeug in der Lage
sein, das Verhalten der anderen Verkehrsteilnehmer für die nächsten Sekunden vorherzusagen und die Wechselwirkungen des eigenen Handelns auf die anderen Verkehrsteilnehmer und umgekehrt zu bewerten. Diese Prognose erfordert es, den Situationskontext mit entsprechenden Randbedingungen im Vergleich zum Stand der Technik detaillierter zu erfassen.
So muss das automatisierte Fahrzeug die Verkehrsführung erkennen, was insbesondere in Kreuzungsszenarien aktuell sensorisch nicht überall lösbar ist, weshalb die Ergänzung mit präziser digitaler Karteninformation notwendig wird. Das System muss auf Basis der Verkehrsregeln und insbesondere der gültigen Vorfahrtsregelungen mit anderen Verkehrsteilnehmern interagieren. In der Stadt reicht dabei beim Interagieren auf engem Raum häufig der Detaillierungsgrad der aktuellen Objektmodelle bzw. die

Modellierung des statischen Umfelds noch nicht aus. Insbesondere inhomogene Fahrbahnoberflächen und Begrenzungsverläufe erschweren die Bestimmung des befahrbaren Fahrkorridors rein aus Sensordaten. Auch hier soll die Umfelderfassung mittels plausibilisierter digitaler Karteninformation ergänzt werden.