Mostly, previous developments used for semi-automated and highly automated driving functions directed their focus on motorways and other dual carriageways with lanes in both directions divided by barriers. The complexity and number of typical vehicle manoeuvres remain low in these scenarios. The explicit interaction between road users can often be represented in the form of rule-based behavioural strategies. When it comes to sensor-based detection of the infrastructure on the road and of other road users, for example by camera, radar and LiDAR systems, a technologically advanced level has now been reached for motorway scenarios. In contrast, sensor-based detection of traffic situations still needs to overcome major challenges if it is to be used for automated driving in an urban environment.
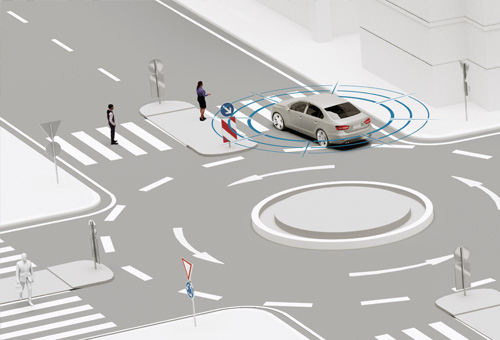
The figure shows an example of an urban intersection and highlights the diversity of, for example, road users, traffic light infrastructure, arrows indicating directions, and parking cars. In comparison to the well structured environment found on motorways, the road rules that must be observed and the interaction with other road users is considerably more complex.