This subproject concentrates on developing the specifications and concepts for all these application scenarios in order to lay the corresponding foundations for the work being done in the other subprojects. Among other activities, this includes defining a catalogue of usage scenarios. The functional requirements,
research issues and criteria this results in, along with the specific scenarios derived from these, will be developed in the subproject right at the start of the project. Specifications that are as detailed as possible, covering all situations that need to be factored in and the required system performance, need to be defined for junctions – which include intersections and roundabouts.
To do this, all potential static topologies of a junction need to be systematically broken down in order to be able to represent any given junction as a composition of individual elements. All road users that need to be factored in (this includes, for example, vehicles used for public transport) must be defined in order to ensure that knowledge of all potential traffic situations occurring at the junction is available, as far as possible. Moreover, the preferred driving behaviour must be defined, and exact functional characteristics must be determined. The system specifications for automated driving through junctions are to form the basis for the derivation of specifications and requirements that apply, for example, to environmental sensing and to digital maps. The functional characteristics also require the human-vehicle interface to interact with the driver and other road users, for which there must be specifications as well. Characteristic scenarios for static bottlenecks are presented by narrowed lanes, structural measures to calm traffic which divide traffic lanes,
urban construction sites or delivery vehicles that park partially in lanes intended for traffic. The focus of the work is, however, directed at dynamic bottlenecks. Each static bottleneck becomes a dynamic bottleneck when, for example, aspects such as oncoming traffic, cyclists, car doors that open etc. are factored into the system configuration.
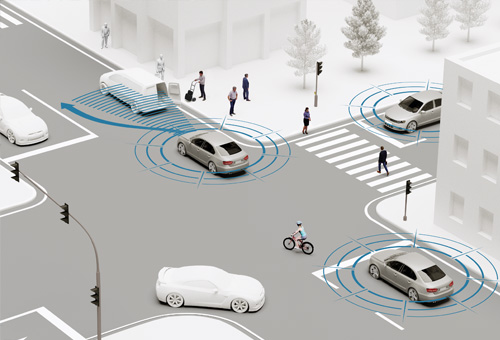
Automated vehicles will face the challenge of identifying and understanding the behaviour and intentions of other road users. This applies to a particularly high degree in situations involving vulnerable road users. Vulnerable road users often communicate in road traffic by using both conscious and unconscious poses or gestures. This could, for example, be the direction in which a pedestrian looks or the hand signal given by a cyclist when turning. To ensure an automated vehicle reacts appropriately when interacting with vulnerable road users, these characteristics of behaviour must be identified and be factored in to behavioural modelling and predictions.