Hochautomatisierte Fahrfunktionen im urbanen Umfeld stehen hierbei vor der Herausforderung, vielfältige Situationen und Szenarien sicher beherrschen zu müssen. Insbesondere Knotenpunkte wie Kreuzungen und Kreisverkehre haben dabei kein einheitliches Erscheinungsbild und erfordern höchst unterschiedliche Reaktionen vom Fahrzeug je nach Verkehrssituation. Zur Erfassung der gesamten Verkehrssituation müssen dabei viele verschiedene Merkmale der statischen Infrastruktur des Knotenpunktes und der aktuellen Verkehrslage berücksichtigt werden. Sowohl Kreuzung als auch Kreisverkehr erfordern darüber hinaus für Automatisiertes Fahren ggf. kooperatives Verhalten, das auch regelwidriges Verhalten anderer Verkehrsteilnehmer berücksichtigt.
In dem Teilprojekt „Automatisiertes Fahren über urbane Knotenpunkte“ wurde eine sichere, automatisierte Fahrzeugführung über ausgesuchte Kreuzungen und Kreisverkehre realisiert. Die Entwicklung erfolgte in drei Schritten mit wachsender Herausforderung:
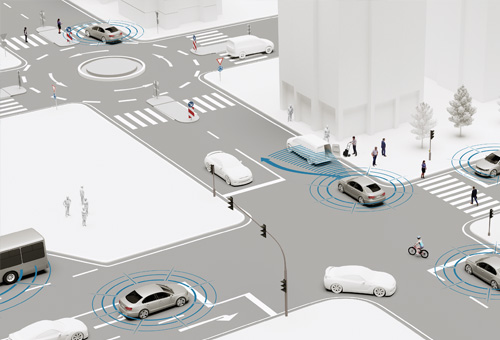
Auch beim Knotenpunkt „Kreisverkehr“ ist die Detektion und Berücksichtigung aller relevanten Verkehrsteilnehmer wichtig. Die Entwicklung fand ebenfalls in drei Stufen statt. Im ersten Schritt erfolgte das Heranfahren an den Kreisverkehr unter Berücksichtigung der relevanten Verkehrsteilnehmer, im weiteren Schritt dann das Einfahren in den Kreisverkehr und das Durchfahren bis zum gewünschten Ausfahrpunkt. Der letzte Schritt berücksichtigte das Ausfahren aus dem Kreisverkehr.