In diesem Teilprojekt wurden die Spezifikationen und Konzepte für all diese Anwendungsfälle erarbeitet, um eine entsprechende Basis für die Arbeiten der anderen Teilprojekte zu bilden. Dies beinhaltete u.a. auch die Definition eines Kataloges mit Nutzenszenarien. Die daraus resultierenden Funktionsanforderungen, Forschungsfragen und
Kriterien sowie die daraus abzuleitenden spezifischen Szenarien wurden im Teilprojekt zu Beginn der Projektlaufzeit erarbeitet. Für Knotenpunkte, die auch Kreuzungen und Kreisverkehre umfassen, wurde eine möglichst vollständige Spezifikation aller zu berücksichtigenden Situationen und des gewünschten Systemverhaltens verfasst. Dazu wurden alle möglichen statischen Topologien eines Knotenpunktes systematisch zerlegt, um jeden beliebigen Knotenpunkt als Zusammensetzung einzelner Elemente darstellen zu können. Auch sind alle zu berücksichtigenden Verkehrsteilnehmer (z.B. auch Fahrzeuge des öffentlichen Nahverkehrs) definiert worden, um möglichst alle Verkehrssituationen an dem Knotenpunkt zu kennen. Weiterhin wurde das gewünschte Fahrverhalten definiert und die genaue Funktionsausprägung festgelegt. Anhand der Systemspezifikationen für das automatisierte Befahren von Knotenpunkten sind Spezifikationen bzw. Anforderungen an z.B. die Umfelderfassung und an digitale Karten abgeleitet worden. Die Funktionsausprägung stellt auch Anforderungen an das Mensch-Fahrzeug-Interface zur Interaktion mit dem Fahrer und den anderen Verkehrsteilnehmern, die ebenfalls spezifiziert wurden.
Charakteristische Szenarien für statische Engstellen stellen Fahrbahnverengungen, verkehrsberuhigende, bauliche Maßnahmen mit Teilung von Mit- und Gegenverkehr, städtische Baustellen oder auch teilweise auf dem Fahrstreifen
parkende Lieferfahrzeuge dar. Der Fokus der Arbeiten lag allerdings auf dynamischen Engstellen. Jede statische Engstelle wird zur dynamischen Engstelle, wenn z.B. Aspekte wie Gegenverkehr, Fahrradfahrer, sich öffnende Fahrzeugtüren etc. in der Systemauslegung berücksichtigt werden.
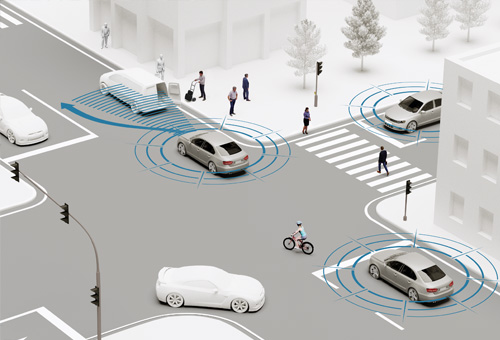
Automatisierte Fahrzeuge stehen vor der Herausforderung, das Verhalten und die Absichten anderer Verkehrsteilnehmer zu erkennen und zu verstehen. Dies gilt in ganz besonderem Maße in Situationen mit schwächeren Verkehrsteilnehmern. Schwächere Verkehrsteilnehmer kommunizieren im Straßenverkehr oftmals mittels bewusster und unbewusster Posen oder Gesten. Das kann beispielsweise die Blickzuwendung eines Fußgängers oder das Handzeichen eines Radfahrers beim Abbiegen sein. Damit ein automatisiertes Fahrzeug bei der Interaktion mit schwächeren Verkehrsteilnehmern angemessen reagiert, müssen diese Verhaltensmerkmale erkannt und bei der Verhaltensmodellierung und -vorhersage berücksichtigt werden.